
|
| Home ⇒ golf ⇒ swing ⇒ Current Article |
Article
Contents
Required grip pressure
Dave Tutelman
-- July 2, 2020 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 The
problem statement is, "How much grip pressure do I need for my swing?"
Golf instruction tells us that that we don't want more tension in the
hands and forearms than is absolutely necessary. But how much is
necessary? There's a traditional analogy, usually attributed to Sam
Snead, to
hold the club "like you were holding a baby bird in your hands". Poetic
for
sure, but is it realistic? Let's find out how much grip pressure you
need just to do the job of swinging your club at
The
problem statement is, "How much grip pressure do I need for my swing?"
Golf instruction tells us that that we don't want more tension in the
hands and forearms than is absolutely necessary. But how much is
necessary? There's a traditional analogy, usually attributed to Sam
Snead, to
hold the club "like you were holding a baby bird in your hands". Poetic
for
sure, but is it realistic? Let's find out how much grip pressure you
need just to do the job of swinging your club at The
clubhead travels on a curved path. It requires a force
perpendicular to the path to keep it from flying off on a
straight line -- thus flying completely out of the golfer's grip. This
perpendicular force is called a centripetal force. Centripetal force depends on the curvature of the
path. Its usual formulation is: Centripetal force depends on the curvature of the
path. Its usual formulation is:
But we have to remember that the clubhead's velocity is due to two effects: the angular velocity of the club (hence the emphasis on centripetal force) and the linear velocity of the hands' motion. On the diagram (built on top of a photo from the Howard's Golf web site), we show these two velocities, which add together to create the clubhead speed. But only VR, the velocity due to rotation, contributes to the centripetal force the hands must exert. How can we separate out VL, so only VR contributes to the centripetal force? For good quality swings, somewhere between 12% and 20% of the clubhead speed depends on the linear hand speed VL. Actually, that variation is mostly from study to study, not from golfer to golfer; the results of any one study seem to come out within a range of a couple of percentage points across the golfers. So let's arbitrarily use 15%, an 85-15 split between speed due to rotation of the club and speed of the hands. That means 85% of clubhead speed can be attributed to rotation of the club, and contributes to the centripetal force. We will calculate the centripetal force by using VR and the obvious radius in the diagram. That system can be superimposed on the linearly translating hands, but only the rotational component gives the force exerted on the hands system -- which is what we are looking for. A word about the radius R. We are using the radius in the translating frame, so we are only dealing with pure angular motion. That radius is from the center of the hands (the "mid-hands point") to the clubhead CG, so it is a few (3 to 4) inches less than the length of the club itself. Now we can find the force due to the clubhead speed V, the clubhead mass M, and the radius R.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| F = | R ∫ r=0 |
dm v2 r |
We will make the assumption that the mass of the shaft (which we call m) is uniformly distributed along its length. This is seldom the case, but is close enough so the answer will not have a large error. Therefore, we write:
| dm = | m R |
dr |
Which gives us:
| F = | m R |
R ∫ r=0 |
v2 r |
dr |
The velocity v at distance r from the mid-hands is proportional to r.
| v = | r R |
VR |
Which gives us:
| F = | m VR2 R3 |
R ∫ r=0 |
r dr |
Evaluating the integral and applying the range gives
| F = | m VR2 R3 |
[ | ½ r2 | R ] r=0 |
| F = | m VR2 2 R |
This is a reasonable and intuitively satisfying result. It says that the force is half what it would be if the shaft's mass were a point mass at R. In fact, it is possible to generalize that a bit. If the mass of the shaft is not uniformly distributed, the fraction is not one half, but rather the distance from the hands to the balance point divided by R. (Just so I don't forget how I derived it, I recorded the derivation in the Appendix.)
Centripetal force: the bottom line
Thus the centripetal force to keep the entire club from flying out of the hands is:| F = | 0.723 V2 R |
(M + m/2) |
That is great as far as it goes. But there remains the small issue of measurement units. The equation demands a consistent set of units, such as meters/kilograms/seconds (MKS) or feet/slugs/seconds. But those are not the units that come to mind if you're an American clubmaker or even American golf instructor. We are more comfortable and intuitive in terms of:
- F in pounds. (Good so far.)
- V in miles per hour. (Not feet per second.)
- R in inches. (Not feet.)
- M and m in grams. (Not slugs nor even pounds.)
Let's start by explicitly including a conversion multiplier to each of our quantities. Since we want the force in pounds, let's use the foot/slug/second system, since its unit of force is the pound.
| Multiply by ↓ | to convert ↓ | into ↓ |
| 1.47 | miles per hour | feet per second |
| 1/12 = 0.0833 | inches | feet |
| 1/14594 | grams | slugs |
| F = | 0.723 * 1.472 V2 .0833 R |
(M + m/2) 14594 |
Multiplying it out, we get our formula for centripetal force.
| F = | 0.00129 V2 R |
(M + m/2) |
This looks like the sort of formula we were hoping for. Let's compute it for a few different clubs:
| Club | Driver graphite shaft |
Driver steel shaft |
5-iron steel shaft |
| Club length | 45.5 | 44.5 | 38 |
| R | 42 | 41 | 34.5 |
| Head mass M | 200 | 200 | 256 |
| Shaft mass m | 50 | 115 | 120 |
| Head speed V ↓ | Centripetal force (pounds) ↓ | ||
| 10 | 1 | 1 | 1 |
| 20 | 3 | 3 | 5 |
| 30 | 6 | 7 | 11 |
| 40 | 11 | 13 | 19 |
| 50 | 17 | 20 | 30 |
| 60 | 25 | 29 | 43 |
| 70 | 34 | 40 | 58 |
| 80 | 44 | 52 | 76 |
| 90 | 56 | 66 | 96 |
| 100 | 69 | 81 | 118 |
| 110 | 84 | 98 | 143 |
| 120 | 100 | 117 | 170 |
| 130 | 117 | 137 | 200 |
| 140 | 135 | 159 | 232 |
| 150 | 155 | 182 | 266 |
This is certainly the same order of magnitude that the conventional wisdom would lead us to expect. There is a graph of this table in the Appendix.
Force for clubhead acceleration
The
next question we have to deal with is, how much additional force
does the golfer exert to keep the clubhead accelerating through
impact? For
golfers who have acceleration going beyond impact, how are they
accelerating the clubhead? In particular how are they accelerating the
angular velocity? I single that out because linear acceleration along
the hand path requires forces along the hand path -- at a right angle
to the major centripetal force we already have. Unless they are
major
forces indeed, they do not add noticeable magnitude to the grip force
required. The graph at the right shows how little effect a small force
has on the magnitude of the total force when added at a right angle to
a larger force. Both the added force and the resulting total are
normalized to a unit force. So even if we have a right angle force of half the centripetal force,
it only increases the total force by 12%. So unless we are looking for
rather precise results, we
can ignore forces along the hand path when looking for the total "pull"
on the hands. For
golfers who have acceleration going beyond impact, how are they
accelerating the clubhead? In particular how are they accelerating the
angular velocity? I single that out because linear acceleration along
the hand path requires forces along the hand path -- at a right angle
to the major centripetal force we already have. Unless they are
major
forces indeed, they do not add noticeable magnitude to the grip force
required. The graph at the right shows how little effect a small force
has on the magnitude of the total force when added at a right angle to
a larger force. Both the added force and the resulting total are
normalized to a unit force. So even if we have a right angle force of half the centripetal force,
it only increases the total force by 12%. So unless we are looking for
rather precise results, we
can ignore forces along the hand path when looking for the total "pull"
on the hands.Let's move on to forces that can cause angular acceleration. Many good golfers do continue their angular acceleration right up to and including impact. How do we know? Because biomechanics studies show a positive net torque on the club, applied by the hands, even at impact. Let's look at what two such studies tell us. |
 These are graphs of the in-plane ("alpha") torque during the swing up until impact. They look different, but are really quite similar.
 The
most significant similarity (important to us, for this discussion) is
the moment of the hand force at impact. It is about 50 Newton-meters on
both graphs. Let us see what the moment of the hand force means. The
most significant similarity (important to us, for this discussion) is
the moment of the hand force at impact. It is about 50 Newton-meters on
both graphs. Let us see what the moment of the hand force means.This image shows Dustin Johnson at the moment of impact. His lead (left) arm is pulling up along its length. We don't know this for a fact, but it is very likely because:
But that is not the line of the shaft! The club is lagging considerably behind the line of force. In fact, that is where the angular acceleration comes from. The "moment of force" that creates all that clubhead speed is due directly to the torque represented by that [red] force time the moment arm, the distance between the line of force and the center of mass of the club. (Engineers call the center of mass the "center of gravity", and it is almost the same place as what clubmakers call the "balance point" of the club.) The basics of physics say that a force on a body not through the center of mass (CoM) generates a torque on the body. The torque is equal to the magnitude of the force times the distance the line of force is from the CoM. We can see that this torque will create angular acceleration to increase the angular velocity of the club -- which is exactly what we should want to do. It is this moment of force, and not the hand couple, that accelerates the club during the last 50-100msec of the swing. I chose a picture of Dustin Johnson (as opposed to some other golfer) because it gave me the most easily understood diagram; few other golfers, if any, have the line of force leading the CoM by as much as he does. This can look very different from golfer to golfer. I tried an interesting calculation: What force would it take to generate 50 Newton-meters of torque given any particular golfer's moment arm at impact. I estimated the moment arm for a half-dozen pictures, and got anywhere from 55 to 220 pounds of force. This rather neatly brackets the sort of numbers we got for centripetal force. For professional golfers, we can expect the driver clubhead speed to be 110-125mph, giving a centripetal force of 85-110 pounds. What should that tell us? My conclusion is not tightly reasoned, but seems (intuitively, to me, at least) to be a good working hypothesis. Top-notch golfers apply all the centripetal force they can, and get their clubhead speed from keeping the line of that force as far ahead of the club as they can. The way a Dustin Johnson generates big clubhead speed is to keep his pulling force further ahead of the club than other golfers can.  So I will
provisionally state that the force exerted by these guys is nearly the
centripetal force, but deflected backwards to move the extended line of
the force forward of the club's CoM. When you deflect a force, you turn
it into two component forces: a slightly smaller force in the original
direction, plus a component perpendicular to the original direction. We
can do a similar graph to the one above, to see how much of a
difference this makes in the force. So I will
provisionally state that the force exerted by these guys is nearly the
centripetal force, but deflected backwards to move the extended line of
the force forward of the club's CoM. When you deflect a force, you turn
it into two component forces: a slightly smaller force in the original
direction, plus a component perpendicular to the original direction. We
can do a similar graph to the one above, to see how much of a
difference this makes in the force.The graph at the right shows how much we have to multiply our original force by to get back to the same centripetal component we had before we deflected the force. Even at 20° of deflection (what Dustin Johnson exhibits in the picture) we only have to make up 6% of the force. That is small enough to be almost negligible. It is worth noting that the camera that took the picture is not aimed perfectly perpendicular to the swing plane. Therefore, any numbers will be approximations at best. I used a plastic protractor on the computer screen to determine that the angle was 20°. The graph says there is no real requirement for precision -- which is good, because there was no real precision either. |
| The bottom line for all this is that the centripetal force, all by itself, is a pretty good approximation to the total force that needs to be resisted by the golfer's grip pressure. It may be off by 5-10 percent (probably less), but it will give you a very good idea how much force is there to be resisted. |
Grip pressure
At this point, we know the force trying to pull the club out of our hands. The final step is to find out how much grip pressure is needed to resist this force, how much is needed to keep the club in our hands.Friction
Now
we know almost everything we need in order to find the grip force. We
know that the force has to be enough to keep  the club
from pulling out of the hands; the hands have to be able to apply the
full centripetal force, and maybe a few percent more. What is left is
friction. the club
from pulling out of the hands; the hands have to be able to apply the
full centripetal force, and maybe a few percent more. What is left is
friction.Here is a view of the club's handle being held by a golfer wearing a glove. The red arrows are the only force the golfer is able to apply directly -- squeeze the handle of the club. This action must be enough to keep the club from being pulled out of the hands by centrifugal force, which is the reaction force to the centripetal force the golfer uses to keep the club rotating in a curved path. But the red arrows, the force the golfer can apply, are all normal (that is, perpendicular) to the direction of the centripetal force the golfer wants to apply. There is no component that can help in this case. How can a normal force create a tangential force? The answer is friction. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Here's
a diagram that, with only minor variation, is in every
physics and engineering text as "Figure 1" for the
chapter on friction. And it will be Figure 1 for us as well. What it
shows is: Here's
a diagram that, with only minor variation, is in every
physics and engineering text as "Figure 1" for the
chapter on friction. And it will be Figure 1 for us as well. What it
shows is:
F =
μs N
This seems to be the problem we are trying to solve. We have the hands exerting forces all around the handle of the club (as in the upper picture). We want those forces to prevent the club from flying out of the hands under the pull of a centripetal force that could exceed 100 pounds. So the problem would appear to be to minimize N (the grip force) for a given F (the centripetal force). In other words, we want a high friction μs between the handle and the hand or glove. With this formulation, the goal we started with is N, the sum of all the normal forces that the hands apply to the handle of the golf club. Since we already know F, we can find out how much N is required from:
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Surface textureIt is fun reading patents and crazy ads in golf magazines, and one kind of off-the-wall innovation in these places is new designs and materials for golf grips and golf gloves. The point of many of these is to raise the coefficient of static friction so high that you just don't have to worry about grip pressure. For the most extreme of these inventions, the baby bird would be quite safe, but the rules of golf would be seriously jeopardized.Here are a few of the more obvious ones, but there are plenty of them.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Taper The picture shows two views (one natural and one
distorted) of a Golf Pride Tour Wrap grip, probably the most popular
grip of all time. The idea of tapering the handle almost certainly
originated from a desire to do better than just friction in letting
the hands apply a centripetal force. The picture shows two views (one natural and one
distorted) of a Golf Pride Tour Wrap grip, probably the most popular
grip of all time. The idea of tapering the handle almost certainly
originated from a desire to do better than just friction in letting
the hands apply a centripetal force.Look at the exaggerated view, where we have increased the butt diameter to artificially increase the amount of taper. I did this so the force vectors can be seen. (This is really a 2D approximation, so we have split N into two forces, one on each side of the grip.) Note that the normal force N, which by definition is normal to the surface, is slanted in such a way as to oppose F, the centrifugal reaction force pulling the club out of the golfer's hands. With a taper, N has a component parallel to the axis of the shaft -- the blue vector. And the blue force is opposing the centrifugal reaction force, and helping the friction force. That friction force is due to N and a coefficient of friction between the hands and the handle. If the angle of taper is a, then the blue helping forces h amount to: h
= 2 N sin(a/2) ≅ N sin(a)
When we look at the true likeness of the Tour Wrap grip, we find that the taper angle is only 4° at its steepest, so:
Research and even simple observation tell us that most of the centripetal force on the grip near impact is exerted by the lead hand. So we should focus on the angle of taper under the lead hand. And in fact, that is where the grip taper is almost always the strongest. Another argument I once saw for a tapered grip is that it provides a fixed diameter the hands can impose to prevent any slippage at all. I don't buy this, but I'm not an anatomist. Perhaps the hands can maintain a diameter like that, but I have only heard of hands being able to impose a diameter by exerting a force -- like N. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Grip force: the bottom line
That transformation, from centripetal force to the total force the hands exert on the grip, boils down to a simple one:
There is a graph of this table in the Appendix. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 There are
obviously other considerations that will modify the 0.7 up or
down:
There are
obviously other considerations that will modify the 0.7 up or
down:Measured human grip strength
Up to this point, we have been modeling the force needed to swing the golf club.Now let's consider the force available. How much grip strength can the golfer actually apply, and is it enough?
Finally, in the next section, we will compare our results to experimental studies of the force actually exerted in a golf swing.
What is grip pressure and why do we care?I don't know whether you noticed, but every time I started to get specific -- for instance, to compute anything -- I talked about force instead of pressure. In fact, they are different, and the answers to any of the quantitative questions have answers of force, not pressure. Let's look at the difference so we can understand why all the answers are forces. In physics and engineering, pressure is the force
per unit area.
If you double the area but keep the pressure constant, then you double
the force. That is very important in hydraulic and pneumatic
mechanisms -- it is the basis of how they work -- but it is also an
important distinction here. For
instance, we measure force in pounds, but pressure is PSI,
pounds per
square inch. (In the metric system, force is Newtons, and pressure is
Newtons per square meter, also called Pascals.) In physics and engineering, pressure is the force
per unit area.
If you double the area but keep the pressure constant, then you double
the force. That is very important in hydraulic and pneumatic
mechanisms -- it is the basis of how they work -- but it is also an
important distinction here. For
instance, we measure force in pounds, but pressure is PSI,
pounds per
square inch. (In the metric system, force is Newtons, and pressure is
Newtons per square meter, also called Pascals.)Here is a picture that may make things clearer. (I can hope so, anyway.) It shows two rectangular prisms with their dimensions and other physical properties. They are the same weight and volume. Let's see what pressure each one exerts on the surface it stis on.
|
||||||||||||||||
So
now we know a bit about what grip pressure is. We already know
the force the hands have to exert on the grip. Can't we convert that to
grip pressure by dividing by the area where the hands meet the handle?
There are several things standing in the way of coming up with a useful
number that way.
Why should we care about grip pressure (or force)? Just grab the club, tightly enough and then some, and go after the ball with it. The reason is that a tight grip and the tense forearms required to produce it has a bad effect on the shot. at the very least, it reduces clubhead speed. It is also easily argued that it has the same effect as trying to manipulate the club with the hands; it hurts consistency and accuracy. Why should it reduce clubhead speed? That doesn't make sense. A tighter grip should let you use more force to swing the club. In fact, our graphs show the force increasing with clubhead speed. Let's start with the graphs. Don't confuse cause and effect. The increase of maximum force with clubhead speed is not because the additional force produces the speed. Rather, it is because additional clubhead speed requires additional centripetal force to prevent the club from flying out of the hands. The force did not produce the speed, but is needed because the speed is there. Now let's look at why a tight grip might reduce clubhead speed. Instructors know it does; here's one of many videos around supporting the notion. The reason boils down to a debate in the biomechanics world about whether hand torque is positive or negative at impact. The large majority of biomechanists have concluded that the hand torque coming into impact is negative; that is, it is slowing the club down. The club is moving so fast that the hands can't keep up with it. If that is true, then any effort the hands try to exert late in the downswing is counterproductive; since the hands can't keep up, they will slow the clubhead as it approaches impact. The best we can do is relax our hands, wrists, and forearms as much as possible. A corollary to this advice is to use as little grip force as we can get away with, because applying grip force with the hands will tense up the grip, make it less like the ideal frictionless hinge it should try to be. Which brings me to the real value of hand strength. Between writing the previous paragraph and this one, I took a lunch break and caught up with a biomechanics forum where I hang out. What was freshly posted there came from a past long drive champion (Monte Scheinblum, 1992 US champion). It was so spot-on for this point, let me splice together a couple of sentences from the thread so it stands on its own: The player has to be capable of
withstanding a great deal of outward force from the clubhead’s momentum
near impact, which is why I believe my ability to create high speeds is
greatly attributed to my 100th percentile hand
strength.
I responded:
Yes, but cause and effect get a
little muddied here. The
hand strength, rather than helping create the speed, allows you to hang
onto the club. BUT... Yeah, it also helps create the speed, because
your hands, wrists, and forearms can be more relaxed when exerting the
force necessary to hang on.
Monte's reply was that he agreed 100%.The significance is that Monte can use a much smaller fraction of his strength capability to prevent the club from flying off. With all that hand strength left in reserve, he can relax his forearms, wrists, and hands at a higher speed than you or I could while exerting the force necessary to hang onto the club. Having established that hand strength is a producer of clubhead speed -- but in a surprising and unexpected way -- let's look at what hand strength is for typical golfers and then how that relates to the grip force that needs to be applied. |
||||||||||||||||
Hand force of real golfers Chris
Daigle, who started me off on this,
pointed me to a video
that discusses the hand force in a golf
grip and exercises to improve it. Hand force is measured by an
instrument called a dynamometer. You squeeze it and it measures the
force you apply, much like a scale measures weight. In fact, exactly
like a scale measures weight. Chris
Daigle, who started me off on this,
pointed me to a video
that discusses the hand force in a golf
grip and exercises to improve it. Hand force is measured by an
instrument called a dynamometer. You squeeze it and it measures the
force you apply, much like a scale measures weight. In fact, exactly
like a scale measures weight.You grip the dynamometer between your four fingers and the base of the thumb. The fingers press down with some amount of force. (In the picture, it is 100 pounds for the combined force of all four fingers.) The base of the thumb presses upward with the same force. We know it is the same force because F=ma and the dynamometer isn't going anywhere. It isn't accelerating, so the net force must be zero. With this combination of forces, the dynamometer will indicate 100 pounds of grip force. (Actually, it isn't exactly the same force. That hand also has to cover the weight of the dynamometer itself, or it will fall to the floor. But it is orders of magnitude less than the grip force.) |
||||||||||||||||
 Here is a table of the grip strength distribution in
some population, I'm not sure what. The source is the user manual for a JAMAR brand
dynamometer. Here is a table of the grip strength distribution in
some population, I'm not sure what. The source is the user manual for a JAMAR brand
dynamometer.Here are a few things that jump off the chart at me:
|
||||||||||||||||
Are
these numbers -- the measured grip strength -- consistent with the
required grip force for the clubhead speeds we know golfers attain?
Let's look at three data points, using a graphite-shaft driver. We will
use a split between lead hand and trail hand at impact of 95-5; I got
that proportioning from measurements which we will discuss in the next
section. That means full strength for the left hand and 5/95=0.053
strength for the right.
At first blush, this would appear to be a successful sanity test. But notice that there is not a lot of margin, a lot of "headroom". The golfer needs to use 80-90% of their grip strength to keep the club from flying off. Think about how much effort you have to put in to get a dynamometer to 80-90% of your maximum reading. That does not square with relaxes forearms and wrists. You may be able to hang onto the club, but it is unlikely that you can get the club to the speed you are otherwise capable of. I conclude that the grip pressure is just too high for the grip strengths in the table. How can we resolve this dilemma? Let's remember that the grip strengths in the table are dynamometer readings. Let's also remember how dynamometer readings relate to the forces the hands are exerting. Remembering this, let's look at an over-simplified view of the forces involved.  On the left, we see the grip pressure represented by six forces of 20 pounds each, all normal to the surface of the grip. Oversimplified for tutorial purposes, not because this is a useful model of the grip. What we have is a total normal force of 120 pounds available to create friction that will exert a centripetal force. On the right we have the same six forces, but we are going to analyze them differently. We are looking for the net force in a vertical direction represented by the yellow dash-dot line. So we have to resolve each force into its components and find the component parallel to the yellow line. That turns out to be 40 pounds downward (red vectors) balancing out 40 pounds upward (blue vectors). It is the latter model that is closer to how a dynamometer works. The fingers press down on one side, the thumb pad presses up on the other, and the instrument measures the pressure in between. The number that pops up is the red numbers in the diagram on the right. (That is numerically the same as the blue numbers; the upward and downward forces are equal, or the dynamometer would accelerate off somewhere.) So the dynamometer is reporting only a third of the total normal force the hand can exert. Of course, the diagrams oversimplify reality; the factor is probably less than three. But it is certainly more than two, because the hand must exert both the upward and the downward forces on the grip. So the dynamometer understates the total normal force the hand can exert by a factor of between two and three, probably closer to two. That makes more sense. It means that the golfer is exerting less than half his or her grip strength to keep the club from flying off, which makes for less speed-robbing tension. Of course, the golfer might still use too tight and too tense a grip -- but at least we know now it is not necessary to do so, and not advantageous either. |
||||||||||||||||
Measurement of grip pressureLet's move on to actual observations of grip force during the golf swing. In 2007, Erin Schmidt published a PhD thesis on the subject (Schmidt, Erin R. (2007): Measurement of grip force and evaluation of its role in a golf shot. Loughborough University. Thesis. https://hdl.handle.net/2134/13125). Most of the measurements were done by electronic pressure sensors, specifically arrays of sensors on the gloves and on the grip of the club. 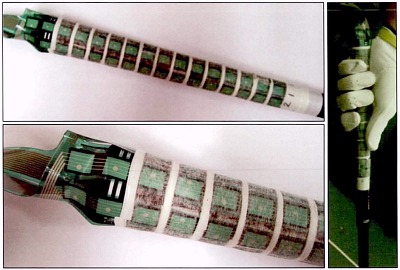 For us though, the point is not the details of the instrumentation, but what we can learn about grip pressure during the golf swing. Here is Schmidt's Figure 8-2, which I have annotated to identify things described in the caption and text of the source document. The graph is the total grip force (the sum of all the glove sensors) vs time for the swing of a professional golfer. Not just any professional, but a Ryder Cup team member, so someone who is really good.  I looked at this and noticed several things, some which rang true and others that made me say, "Hmmm!"
1. Very little right hand forceWe should already know this, even without seeing Schmidt's graph. If you watch the tour pros play on TV, you will have noticed some big hitters that actually let go with their right hand at or just after impact. For instance, Vijay Singh, Fred Couples, and Phil Mickelson. (I don't know if any golfers from the most recent generation do, but these guys did even at their prime.) That is zero percent right hand at impact, even more extreme than the 5% we used in our calculations earlier. There is even a video by Clay Ballard explaining how and why this works.The fact that Ballard has bothered to make a video on the subject suggests this is not known and practiced by everybody. Good golfers do it, but many beginners and duffers do not. Here is a set of force traces like the one above, but for sixteen of the amateur golfers in the study. They are presented in order of increasing handicap; the handicap index is in parentheses on the graph. While there is not a perfectly uniform increase of percent right hand force with handicap, you can notice a trend. And the two highest index golfers in the figure have right-hand contributions of more like 30% than 5%.  |
||||||||||||||||
2. Not enough total forceAt impact, 36 pounds is not nearly enough to keep the club from flying out of our hands; that would be more like 120 pounds. How is it even possible to measure such a low number?Remember that Schmidt had two different types of measurements: sensors on the gloves and sensors on the grip. The separate-hands graph above was made from glove measurements. If we compare it with graphs from the grip sensors, we will find a similar shape but a very different scale. 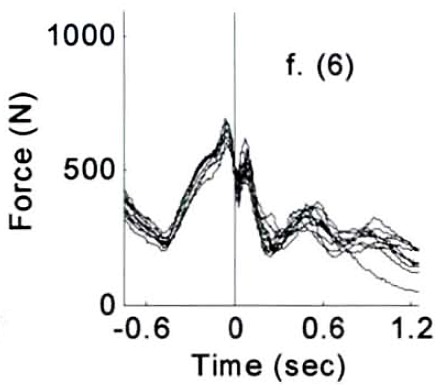 Unfortunately,
Schmidt did not capture the swing of the Ryder Cupper using the grip
sensors, just the glove sensors. So I can't compare the two instruments
with the same swing. As my "plan B"I have chosen one trace from a
display of grip sensor data of multiple golfers.
I chose the trace that looked to my eye to be most like the shape of
the professional. It turned out to be a 6-handicap golfer. (The
multiple traces on the graph reflect a different point Schmidt was
making: the swing of any one golfer is a "signature" that doesn't vary
much from swing to swing.) Unfortunately,
Schmidt did not capture the swing of the Ryder Cupper using the grip
sensors, just the glove sensors. So I can't compare the two instruments
with the same swing. As my "plan B"I have chosen one trace from a
display of grip sensor data of multiple golfers.
I chose the trace that looked to my eye to be most like the shape of
the professional. It turned out to be a 6-handicap golfer. (The
multiple traces on the graph reflect a different point Schmidt was
making: the swing of any one golfer is a "signature" that doesn't vary
much from swing to swing.)In this trace, the force at impact is about 500N, or 113 pounds. That is much closer to the 120 pounds we need to keep the clubhead from flying off. The difference might be experimental, or it might be due to a very understandable difference in clubhead speed between the single-digit amateur and the Ryder Cup team professional. Depending on which explanation is correct, there is a factor of 3.1 or 3.3 between the glove sensors and the grip sensors. For the rest of our interpretation, let's assume a compromise value of 3.2. We still ought to try to understand why there is a difference between the glove sensor and the grip sensor. Schmidt has noted differences in the area covered by the sensors. That is a credible explanation; if you look at the pictures of the glove and the grip above, the grip has a much larger percentage of the area covered. So the glove might be applying forces to the grip through a surface other than the sensor itself. I suspect that could completely explain the difference. So why use an instrumented glove at all, if its reported force is a factor of more than 3 on the low side? The answer is detail. Only with the glove sensors can you assign a force to each finger, and even a LH-RH assignment may be less than 100% reliable from an instrumented grip. We will need this full understanding as we go on to the next "Hmmm!" |
||||||||||||||||
3. Maximum force 80 milliseconds before impactThe maximum total force for the professional golfer occurred about 60% of the way through the downswing, a full 80msec before impact. That is when the torque accelerating the club is changing from the hand couple to the inertial moment of the force. The centripetal force being exerted by the hands is a lot lower than at impact, because:
All I could think of was the hand couple, perhaps at its maximum before it gave way to inertial release. Let's check this out. Fortunately, we have some actual measurements to help us:
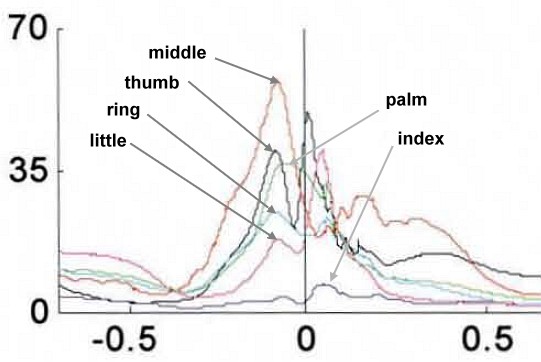 Let's
start with the individual finger forces of the left hand. Here is
Schmidt's graph of the finger forces in Newtons, which are from the
same professional swing as the hand forces shown earlier. It is very
clear where the forces peak, as well as the "slot" just before impact. Let's
start with the individual finger forces of the left hand. Here is
Schmidt's graph of the finger forces in Newtons, which are from the
same professional swing as the hand forces shown earlier. It is very
clear where the forces peak, as well as the "slot" just before impact.The significant forces are:
|
||||||||||||||||
 Let's
see what that looks like on a force diagram. Here are the significant
forces, as identified above. The index finger exerts a very small
force, and we can see that the palm is pressing perpendicularly to the
other forces. Let's
see what that looks like on a force diagram. Here are the significant
forces, as identified above. The index finger exerts a very small
force, and we can see that the palm is pressing perpendicularly to the
other forces.Let's see what the net force and torque the left hand is exerting on the club. The forces, of course are in red and labeled. The green line is a "ruler", with tick marks every 25mm (roughly one inch). We see that the finger forces are on the 0, 25, 50, and 100mm ticks. |
||||||||||||||||
 Let's resolve this into a net force and a couple. Let's resolve this into a net force and a couple.The net force is easy. It is 60 N upward. (15+25+60-40) It is harder to know where that net force is, but we will need to in order to find the equivalent couple. We separate out the upward and downward forces and find where each group would be as an equivalent single force. The downward forces are easy; there is only one of them, the 40N force. We treat the upward forces as if they were weights, and find the center of gravity of those weights. That turns out to be 64mm from the downward force. So the two solid red vectors are the equivalent upward and downward forces. They are:
192 N upward and 8.2 Nm in a
direction to release the club.
Do we have a sanity test for this number? It turns out that we do. |
||||||||||||||||
| A
Japanese team headed by S. Koike has published several papers over the
years, describing the results of studies involving an instrumented grip
to determine the hand forces and hand couples during the swing. Here is
an excerpt from the abstract of their 2006 paper (S. Koike, H.
Iida, H, Shiraki, M. Ae, An
Instrumented Grip Handle for Golf Clubs to Measure Forces and Moments
Exerted by Each Hand During the Swing Motion,
Engineering and Sport 6, 2006.) An
instrumented grip handle was designed to simultaneously measure the
forces and moments exerted by each hand on the handle during golf
swing. Eleven pairs of strain gages were attached on the surface of an
aluminum bar inserted under separated grip covers... A professional
golf player participated in this study and performed golf swings with
several clubs.
Here is a graph of the key results in Koike's study. I have shown our left-hand cross-shaft force and torque on the graph. The red dots are the values we just computed from the Schmidt measurements, and the green dots are Koike's measurements.  The good news is our numbers are within a factor of two of Koike's numbers. The bad news is:
The first is not really that much of a problem. The factor of 3.2 was the result of eyeballing the grip sensor measurements when comparing them against the glove sensor measurements. We were further hampered by not having a grip sensor graph of the Ryder Cup professional's swing, so we were operating by guesswork. We compared the glove measurements of a top tour professional with the grip measurements of a six handicap amateur. So the actual factor might be quite different. An even more likely explanation is our assumption that the grip sensor measurements were an accurate representation of the total grip force. But look at the instrumented grip. It is likely that there is unmeasured pressure here, just less unmeasured pressure than the glove sensor measurements. If we accounted for everything, we might get numbers close to what Koike did. The second discrepancy, the near absence of any significant right-hand influence, is much harder to explain. Perhaps Schmidt got it right and Koike did not. Perhaps they both got it right for the population of golfers they tested. I don't know. |
Conclusion
We first found F, the centripetal force the hands need to exert on the club to keep it from flying down the fairway. Then we looked at the mechanisms by which the hands can exert an axial force on the club shaft. They consist of friction and taper. Applying these mechanisms to the formula for F, we get the following expression for G, the total force in pounds the hands exert on the grip.| G = | 0.00129 V2 μs R |
(M + m/2) [1 - sin(a)] |
Where:
- V is the clubhead speed, in miles per hour.
- μs is the static coefficient of friction between the hands and the handle..
- R is the distance from the mid-hands point to the center of mass of the clubhead, in inches.
- M is the mass of the clubhead, in grams.
- m is the mass of the shaft, in grams.
- a is the angle of taper of the grip where the hands are applying the force.
Appendix
Shaft with a non-uniform mass distribution
Math stuff. You won't miss much if you
don't bother reading this. But
if you're an engineer, you might enjoy it.
This is the derivation of the centripetal force of the shaft, where the mass distribution is arbitrary. The centripetal force turns out to depend only on where that distribution places the balance point of the shaft. We will refer to the diagram we used for the same calculation with a uniform distribution.
Let us begin by exploring the balance point. We define the distance from mid-hands to the balance point as B, and the arbitrary mass density along the shaft as D(r). B is calculated as:
Every engineer should know this off the top of their head. You did dozens of homework problems in school based on this formula. Remember this; we'll get back to it at the end.
Now let's take our original formula for the centripetal force on the shaft, slightly reformulated for an arbitrary D(r). Specifically, we know that dm=D(r)dr.
Plugging in v=(V/R)r from our earlier work, we get:
Now let's get clever and multiply both numerator and denominator by the shaft mass m.This should not change anything.
We should recognize the part inside parentheses as the balance point distance B. So the centripetal force becomes:
That is, the centripetal force is a fraction of the force from a point mass at the tip of the shaft (the first factor), that fraction being B/R. If the shaft has a uniform mass distribution, then the balance point is in the middle and B/R is one half -- the result we got earlier.
This is the derivation of the centripetal force of the shaft, where the mass distribution is arbitrary. The centripetal force turns out to depend only on where that distribution places the balance point of the shaft. We will refer to the diagram we used for the same calculation with a uniform distribution.
Let us begin by exploring the balance point. We define the distance from mid-hands to the balance point as B, and the arbitrary mass density along the shaft as D(r). B is calculated as:
| B = | 1 m |
R ∫ r=0 |
r D(r) dr |
Every engineer should know this off the top of their head. You did dozens of homework problems in school based on this formula. Remember this; we'll get back to it at the end.
Now let's take our original formula for the centripetal force on the shaft, slightly reformulated for an arbitrary D(r). Specifically, we know that dm=D(r)dr.
| F = | R ∫ r=0 |
v2 dm r |
= | R ∫ r=0 |
v2 D(r) dr r |
Plugging in v=(V/R)r from our earlier work, we get:
| F = | R ∫ r=0 |
r2 VR2
D(r) dr R2 r |
= | VR2 R2 |
R ∫ r=0 |
r D(r) dr |
Now let's get clever and multiply both numerator and denominator by the shaft mass m.This should not change anything.
| F = | m VR2 R2 |
( | 1 m |
R ∫ r=0 |
r D(r) dr ) |
We should recognize the part inside parentheses as the balance point distance B. So the centripetal force becomes:
| F = | m VR2 R |
B R |
That is, the centripetal force is a fraction of the force from a point mass at the tip of the shaft (the first factor), that fraction being B/R. If the shaft has a uniform mass distribution, then the balance point is in the middle and B/R is one half -- the result we got earlier.
Graph of centripetal force vs clubhead speed
Graph of grip force vs clubhead speed
Last
modified -- July 23, 2020
|
|