All about Gear Effect - 1
Dave
Tutelman --
February 19, 2009
Horizontal gear effectGear effect is caused by the rotation of the clubhead around its center
of gravity, when a ball is struck off-center. Let's look at that a
little more closely.
Figure 1-1
When
the ball is struck by the clubhead, each exert force on the other.
The force of the ball on the clubhead either goes through the center of
gravity (hereinafter called the CG) or not. If the force is not through
the CG, then the CG tends to stay were it is, so the force generates a
torque that wants to rotate the clubhead around its CG.
In the picture, the force misses passing through the CG by a distance x.
So the torque wanting to turn the clubhead is the force times x.
Also in the picture is C, the
distance the CG is back from the face. That will figure in our analysis.
If the ball misses to the right or left of the CG, the clubhead will
rotate right or left, producing hook spin or slice spin. This is what
is usually meant by gear effect, but is more properly called horizontal
gear effect because the head is rotating in a horizontal
plane.
By the same token, a miss above or below the CG will produce topspin or
backspin. (Well, it probably won't produce enough topspin to overpower
the backspin that's there due to the loft of the clubhead. So, strictly
speaking, it
is reducing backspin, not producing topspin.) This is called vertical
gear effect, because the spin is in a vertical plane.

Figure 1-2
(The diagram of the driver head is adapted from
a photo
of the Vector 460-TS driver from The Golf Coast)
Since all gear effect is based on the clubhead rotating due to impact,
we will need to know the moment of inertia of the clubhead. Actually,
we will need to know two moments of inertia. MOI is not a property of
an object, but of an object and an axis of rotation.
For horizontal gear effect, the clubhead rotates about the yellow axis
in the diagram, which goes through the CG. For vertical gear effect it
is the red axis, which also goes through the CG.
Horizontal
gear effect
Let's get on with the business of coming up with a formula for the spin
due to gear effect. Here are the symbols we will use and what they
represent.
| Vb |
Initial velocity of the ball. |
| m |
Mass of the ball. |
| Ih |
Moment of inertia of the clubhead about the yellow
axis in Figure 1-2 (i.e.- for horizontal gear effect).
We use the engineer's notation of I
rather than the golf jargon MOI. |
| Iv |
Moment of inertia of the clubhead about the red axis
in Figure 1-2 (i.e.- for vertical gear effect). |
| C |
Distance from clubface to CG (see Figure 1-1). |
| x |
Distance from force to CG (see Figure 1-1). |
| F(t) |
The force between clubface and ball. This varies
during the time of impact, and is zero at all other times. |
| ω |
Angular velocity of the clubhead as the ball leaves the clubface. |
| v |
Sideways velocity of the clubface as the ball
separates from it. This sideways velocity is what imparts gear effect
spin. |
| s |
Initial spin of the ball due to gear effect, in
revolutions per minute (rpm). |
We will use standard (mks - meter/kilogram/second) units to keep the math simple. At the end,
we will convert the formula to work in more familiar units.
Figure 1-1 shows the clubface striking the ball a distance x
from the CG. There is a force F(t)
exerted by the ball on the
clubhead, and of course an equal and opposite F(t)
exerted by the clubhead
on the ball. The ball is accelerated during the half millisecond of
impact to velocity Vb,
which gives it a momentum of mVb.
Because momentum equals impulse:
mVb
= ∫F(t)dt
The
impulse (the right-hand side of the equation) links the ball to the
clubhead. Exactly the same impulse is imparted to the clubhead at the
point of contact. We can express the impulse on the clubhead as a
torque impulse about the CG, simply by multiplying the force function
by the lever arm x. So now we
have the making of the rotational impulse-momentum equation:
Ihω
= x∫F(t)dt
Since F(t) and thus ∫F(t)dt
is the same for both
equations, we can write it as:
Ihω
= xmVb
Which is easily solved for the rotational velocity as:
That was remarkably easy. Yes, some integral calculus showed up at one
point; but everything there canceled out before we had to worry about
how to do the integration.
And it was remarkably powerful. Now we have the rotational motion of
the
clubhead as the ball is departing. It's actually pretty easy to get the
spin from this. No more physics, just geometry.
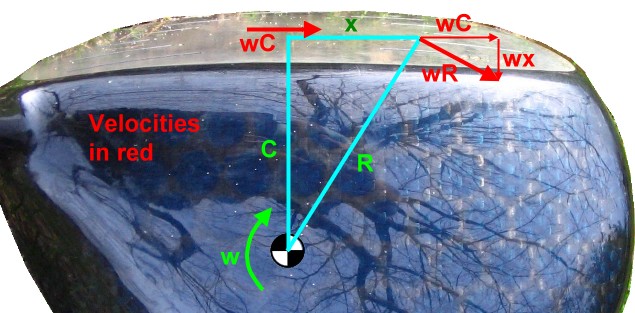
Figure 1-3
In Figure 1-3, the clubhead is rotating about its CG at ω radians
per second. (It's "w" in the diagram because of the limitations of my
drawing program.) Since the linear velocity tangent to the rotation is
the radius times ω, the sideways
velocity at the middle of the clubface is ωC.
The velocities at the point of impact -- a distance x
from the middle of the clubface -- is only a little harder. This time
the radius is R, and the
velocity ωR is again
perpendicular to the radius, but this time at an angle to the clubface.
We could calculate R
using either the Pythagorean Theorem or trigonometry (I did it both
ways the first time through). But it won't matter. Because the triangle
of velocity vectors is a right triangle similar to the triangle of
distances, we can just write the two velocities down by inspection as ωC
and ωx. (If you do all the
calculations, what you got for R
will cancel out.) So we have:
| ωC |
The
sideways motion of the face that is synchronized to the rotation of the
ball as the ball leaves the face. Earlier, we called that v
in our notation. Obviously this is how we are going to compute the
spin. It's all easy from here. |
| ωx |
The
backwards motion of the face away from the ball. This is why the ball
does not have as much speed on an off-center hit. We could compute the
speed loss from this, but we have other fish to fry here. |
To go from v = ωC to
spin in rpm requires:
- Dividing by the circumference of a golf ball. The velocity
v is in meters per second. Divide by the circumference in meters and we
have revolutions per second.
- Multiplying by 60 to go from revolutions per second to
revolutions per minute.
Since the golf ball's mass is within a fraction of a gram of 46g (or
0.046Kg):
| s =
20.4 Vb |
C x
Ih |
(Equation
1) |
This is the result we were after! And it is remarkably simple.
Real
numbers, and a sanity test
When we get to talking about real numbers, it would be more
convenient if we could use the units we normally use as clubmakers. (I
live in the USA. Apologies to those of you reading this who are
already metric.)
- Vb
in miles per hour
- C and x
in inches.
- Ih
in g-cm2.
Let's crank the unit conversion factors into the formula.
| s |
= |
| 20.4 * .447 Vb |
.0254 C
* .0254 x
10-7
Ih |
|
|
|
= |
|
(Equation 2) |
While we're at it, the average force on the clubhead during impact,
using units of miles per hour and pounds of force, is:
F = 9.24 Vb
We may need that from time to time.
Numbers for real driversBefore we proceed any further, we need to know Ih and
C for real drivers. (We will also need bulge radius, if we want to consider the actual trajectory implications.)
First the clubhead's horizontal moment of inertia Ih.
I started by looking in component catalogs for listings of Ih.
The only catalog I could find that gives this information is
Golfsmith's online web site. Their modern 460cc drivers covered a range
from 4400 to 5800 g-cm2. The "typical" new
driver seemed to be about 5200 g-cm2. I used
that value in the first draft of this study.
Jeff Summitt challenged this, and pointed me to a Japanese
web site that reprinted tests of OEM clubs from Alba
magazine. It had actual
measured values for 17 current driver models. (I have duplicated their
data in
tabular form for ease of viewing.) These showed a much larger
range of MOI than the Golfsmith catalog, and generally lower values.
Only two were over 5000 g-cm2, and there was one
under 4000. The average was under 4600 g-cm2,
well below the 5900g-cm2 limit imposed
by the Rules of golf.
Conclusion: Even allowing for the fact that almost every driver on the
market today is at the 460cc volume limit in the Rules, very
few so far are pushing the Ih
limit of 5900 g-cm2. It takes conscious
allocation of peripheral weight, plus broadening and lengthening the
head, to approach the legal limit.
Next, we want to find the distance C
from the CG to the face. This is generally referred
to as the "CG depth". Again, I started with resources on hand. I
measured the CG depth of four fairly recent driver heads:
Vector
460TS, Wishon
915CFE, KZG Gemini, and Dynacraft Prophet. They varied, but not much; I
found a range of 1.2" to 1.3", probably no bigger a range than
the imprecision of my measurements.
Then I recognized that the Alba test data from the Inpakuto.com
web site contained not only MOI data but CG depth as well. When I
checked it out, I saw a variation from 32mm to 47mm; in inches, that's
1.25" to 1.85". Once again, we see a much larger range than I was led
to believe by easily available information. This data presents two
problems for me:
- My measurements (1.2"-1.3") are hanging off the low end of
the range (1.25"-1.85").
- It looks like there will be a wide range of gear effect
spin from
different drivers, which we have to take into account.
A look at the way CG depth was measured by Alba can explain #1. They
measured from the leading edge of the driver back to the CG. But the
leading edge is the bottom of the face. Because of loft, the middle of
the face will be closer to the CG, and the middle of the face is what I
measured. At driver lofts, the Alba measurements will be about 14%
greater than C, which is
measured from the middle of the face. If this additional
14% is taken into account, my measurements are more like 1.4"-1.5",
well within the range of the tested drivers.
Problem #2, the large variation in C, is more difficult.
But wait! Eyeballing the data suggests that larger MOI goes hand in
hand with larger CG depth. I went through a few statistical tests to
see whether that is a dependable relationship:
|
MOI |
CG
depth |
Ratio
I/C |
| Average |
4575 |
37.7 |
121 |
Standard
Deviation |
462 |
3.55 |
3.18 |
Std Dev
as percent
of average |
10% |
9.4% |
2.5% |
- First I determined the average and the standard
deviation
of the moment of inertia, the CG depth, and the ratio of the two.
(Actually, I first removed one "wild data point", the Callaway Legacy
driver, which was way off the statistical trend of the other heads.)
The result (shown in the table): while MOI and CG depth both had a lot
of variation -- a standard deviation of about 10% -- their ratio only
had a standard deviation of 2.5%. That suggests a very strong
correlation.
|

Figure 1-4
- Next I used Excel's
charting
function to do a scatter plot of CG depth vs MOI. Figure 1-4 shows the
points lining up very visibly. Excel supports adding a trendline that
best fits the data; that is the white line in the graph. R2
is a measure of correlation, with 1.0 being perfect correlation. For
this data, it is .92, which is very strong.
Why is that important? Turns out it is very important. Remember that
our equation for spin has C in
the numberator and Ih in
the denominator. So, if the ratio of C
to Ih is
constant, then the spin does not vary much with CG depth or moment of
inertia -- because they track one another and balance out.
So we are going to pretend that there is only one driver in existence,
one that lives on the white line in Figure 1-4. It can be anywhere on
the white line; all points on the line will give equal spin. Let's just
pick a point on the line, and see what happens to eqaution 2. Let's try
Ih=5100
and CG depth=42mm. C is 14% less
than CG depth, so C=36mm=1.42inches.
|
We can fold this back into Equation 2 and get:
| s |
= |
|
|
|
= |
16.4 Vb x |
(Equation
2a) |
This is amazingly simple, and is a good approximation for a wide range
of drivers. If we use this to estimate gear effect spin, the
statistical error will be only 2.5%; that's only 25cpm out of 1000cpm
of gear effect.
Finally, we will need bulge radius.
Drivers use bulge to compensate for gear effect. Any full-trajectory
implication of gear effect must be calculated with bulge figured in.
The
range of
bulge that I found in catalogs that list bulge was 10"-13" radius of
curvature. The most common number was 12", with 10" in second place. We
will use a typical 12" bulge for the rest of our calculations.
Sanity test

Figure 1-5
Does equation 2a give correct results? We have a way to check this. The
face bulge on a driver is used to counter gear effect; it starts a miss
to the right of center (like the example in our diagrams) out to the
right so the hook spin brings it back towards the center.
Figure 1-5 is a top view of a driver head with an
exaggerated bulge curvature. The hit depicted is a miss 1" toward the
toe. Because of curvature, the ball is struck as if there were a "loft"
in the horizontal as well as the vertical direction. Without any gear
effect, the shot will start right (because of the bulge) and slice even
more to the right (because of the horizontal "loft"). But gear effect
contributes hook spin, with the intent of getting the ball back on-line.
Let's assume that the designers of the driver know what they are doing.
If so, the combination of bulge curvature and gear effect
should result in a much smaller error in the actual drive than the gear effect alone with no bulge
curvature. So let's test our formula against our typical driver. We
will use equation 2a and a 12" bulge radius.
The table below shows how gear effect and bulge counter one
another. The numbers come from:
- Simple trigonometry; e.g. - the "loft" is the arctan of (x
divided by the bulge radius).
- Equation 2a above.
- TrajectoWare
Drive software.
With our ball speed of 150mph, the golfer will hit a typical
well-suited (11°) driver about 240 yards (assuming zero angle of
attack, center impact, etc). So we will look at the side error using an
11° driver. As noted above, we assume a 12" bulge. We use C=1.3" where we need C -- roughly the average value from the Alba tests.
Miss
(how far
towards toe) |
Horizontal
"loft"
due
to bulge |
Horizontal
"launch
angle" |
Slice
spin
due to
bulge |
Hook
spin
due to
gear effect |
Hook
spin
(net) |
Total
side
error |
Hook
without
bulge |
| ¼ |
1.2° |
1.1° |
338 |
553 |
215 |
3 yards
left |
20 yards
left |
| ½" |
2.4° |
2.1° |
676 |
1113 |
437 |
6 yards
left |
38 yards
left |
| 1" |
4.8° |
4.2° |
1354 |
2192 |
838 |
10 yards
left |
61 yards
left |
| 1½" |
7.1° |
6.2° |
2005 |
3294 |
1289 |
11 yards
left |
72 yards
left |
The table shows the steps to computing the total side error
-- the green column. (For more detail on how the computation was done, use this link.)
Compare the green column with the red column, which is the error which is what the error
would have with a flat face, no bulge.
That is a pretty good confirmation
of both the formula and the design of the driver. For each miss -- even
missing the "sweet spot" by an inch and a half, almost off the face --
the total side error is at least six times less than it would have been
without bulge.
The errors due to bulge do a fine job of canceling out the errors due
to gear effect. And they could be even better. A few calculations at a
10½" bulge radius shows very small errors, in the vicinity of a yard. This data strongly suggests that the formula for spin is
sound.
Interesting historical note:
In 1946, a patent was issued
to John Baymiller and Robert Vose of Spalding Golf. It disclosed a
formula relating the optimum bulge radius to the CG depth. The formula
is largely empirical, based on many measurements of real hits with the
wooden clubs then current. For C=1.3", the formula
recommends an optimum bulge of 9½", just an inch less than our
analysis-based optimum seems to be. Bearing in mind that the moment of
inertia of a clubhead was lower in 1946, you would expect the
ideal C to be smaller.
Interesting personal note:
John Baymiller is the father of Bernie Baymiller, a custom clubmaker
and a friend of mine. He gave me a copy of the patent long ago, but I
finally understand it better now.
|
Last modified - Feb 19, 2009
|


