App 1 - Alba test data from inpakuto.com
This table is a transcription of late-2008 test data from a Japanese web site.| Club | Listed loft |
Actual loft |
Horizontal MOI |
MOI about shaft centerline |
Depth of CG |
Shaft centerline to CG |
Face angle |
| Bridgestone/Tourstage 2009 X-Drive 701 | 9.5º | 10.3º | 4192gcm2 | 7023gcm2 | 35.3mm | 40.8mm | Open 0.3º |
| Bridgestone/Tourstage 2009 X-Drive GR | 9.5º | 10.5º | 4351gcm2 | 7379gcm2 | 36.3mm | 40.0mm | Closed 1.0º |
| Srixon ZR-800 | 9.5º | 10.6º | 4226gcm2 | 6794gcm2 | 34.3mm | 40.0mm | Square |
| Srixon ZR-30 | 9.5º | 10.5º | 3870gcm2 | 6206gcm2 | 32.2mm | 38.4mm | Open 0.5º |
| Mizuno 2009 MP Craft T1 | 9.5º | 9.4º | 4241gcm2 | 6959gcm2 | 34.1mm | 39.4mm | Open 0.5º |
| Mizuno 2009 MP Craft R1: | 9.5º | 10.1º | 4527gcm2 | 7389gcm2 | 38.2mm | 38.9mm | Square |
| Titleist 909D2 | 9.5º | 8.7º | 4779gcm2 | 8058gcm2 | 39.1mm | 40.4mm | Open 1.0º |
| Titleist 909D3 | 9.5º | 9.8º | 4500gcm2 | 7453gcm2 | 36.3mm | 40.4mm | Open 0.5º |
| Taylormade Japan 2009 Burner Plus | 10.5º | 11.5º | 5146gcm2 | 8479gcm2 | 42.0mm | 40.7mm | Closed 1.5º |
| Taylormade Tour Burner | 9.5º | 10.0º | 4821gcm2 | 8010gcm2 | 40.0mm | 40.3mm | Open 1.0º |
| Callaway Legacy | 9.5º | 9.2º | 4204gcm2 | 7157gcm2 | 40.5mm | 36.8mm | Open 1.0º |
| Callaway Hyper X | 10.0º | 11.3º | 4519gcm2 | 6751gcm2 | 38.9mm | 35.5mm | Square |
| Yamaha Inpres X 4.6D | 10.0º | 12.0º | 4339gcm2 | 6472gcm2 | 34.6mm | 34.9mm | Closed 1.0º |
| Nike Sasquatch Sumo2 5900 | 10.5º | 11.7º | 5867gcm2 | 9799gcm2 | 47.0mm | 42.2mm | Closed 1.2º |
| Ping Rapture V2 | 10.5º | 12.5º | 4478gcm2 | 7921gcm2 | 38.0mm | 44.1mm | Closed 1.0º |
| Cobra L5V | 10.5º | 14.0º | 4875gcm2 | 7857gcm2 | 38.4mm | 43.2mm | Closed 2.0º |
| Cleveland Launcher | 10.5º | 12.3º | 4467gcm2 | 7968gcm2 | 37.9mm | 43.0mm | Closed 1.5º |
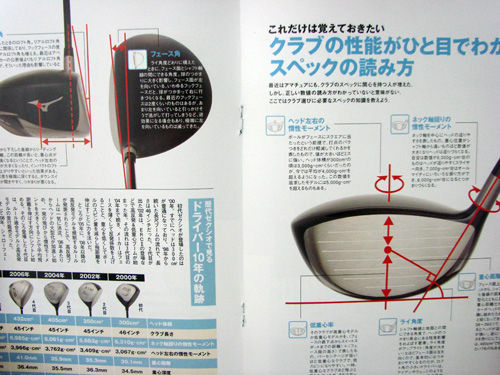 This
page from Alba magazine shows the key measurements taken for the tests.
This
page from Alba magazine shows the key measurements taken for the tests.App 2 - Calculations for horizontal gear effect
| Miss (how far towards toe) |
Horizontal "loft" due to bulge |
Horizontal "launch angle" |
Slice
spin due to bulge |
Hook
spin due to gear effect |
Hook
spin (net) |
Total side error |
Hook without bulge |
| ¼ | 1.2° | 1.1° | 338 | 553 | 215 | 3 yards left | 20 yards left |
| ½" | 2.4° | 2.1° | 676 | 1113 | 437 | 6 yards left | 38 yards left |
| 1" | 4.8° | 4.2° | 1354 | 2192 | 838 | 10 yards left | 61 yards left |
| 1½" | 7.1° | 6.2° | 2005 | 3294 | 1289 | 11 yards left | 72 yards left |
How the calculations were done, column by column:
| Miss | Given |
| Horizontal "loft" | Trig: arctan (miss/radius) |
| Horizontal "launch angle" | TrajectoWare
Drive (TWD): Use horizontal loft as face angle, and read launch angle |
| Slice spin (bulge) | TWD: As above, read sidespin |
| Hook spin (gear effect) | Compute
y from miss and horizontal launch angle: y=miss-Csin(HorLaunchAngle) (See section on vertical gear effect for rationale) Then equation 2a to get the spin. |
| Hook spin (net) | The difference of the previous two columns |
| Total side error | TWD:Using zero-miss launch conditions, crank in horizontal launch angle and net spin |
| Hook without bulge | Use
equation 2a for the spin, with y=miss Then TWD to find the size of the hook. |
App 3 -Bend of a shaft loaded with both force and moment
This is a sidebar to the article on Gear Effect. We need to know the details of shaft bend (deflection curve and tip angle) for a cantilever shaft that is loaded with both:- The force from impact with a golf ball.
- A moment because the impact is y inches above or below the club's center of gravity.
| Deflection D as a function of postion (x) on shaft | Angle θ (actually slope) at tip | ||||
| Applied
force P |
|
|
|||
| Applied
moment M |
|
|
If we apply a force that wants to bend the tip backwards (negative) at the same time as a moment that wants to bend the tip forward (positive), then superposition tells us that D and θ are the difference of the Ds and θs for the moment minus the force.
So far, so good. But we can easily compute what M and P are. They are produced by the ball hitting the clubhead. We encountered them as we derived Equation 1 in the article on gear effect.
D =
Mx2
2EI- Px2
6EI(3L - x) =
x2
2EI[ M - P(L - x/3)] θ =
ML
EI- PL2
2EI=
L
EI( M - PL/2 )
Let's do the force first. We know from the impulse-momentum conservation at impact:
mVb = ∫F(t)dtIf we take P to be the average force over a half-millisecond impact (.0005 sec), this is just:
mVb = .0005 PSolving for P, we get:
P = 2000 mVbSince all golf balls are almost exactly 46 grams (.046Kg):
P = 92 VbThe moment is the force times the lever arm y. Looking at the average moment:
M = 92 Vb yIf we plug these back into the equations for deflection and angle, we get:
Deflection at x = 46Vb
EIx2( y + x/3 - L )
These are all metric (MKS) units. We would like to have L, x, y, and Deflection in inches, and Vb in miles per hour. Moreover, the tip angle is in radians, and we want it in degrees. Applying the proper conversion factors:
Tip Angle = 92Vb
EIL( y - L/2 )
These are the equations we use in the article.
Deflection at x =
46 Vb * .447
EIx2( y + x/3 - L ) * .02543 / .0254 =
.0133 Vb
EIx2( y + x/3 - L ) Tip Angle =
92 Vb * .447
EIL( y - L/2 ) * .02542 * 180 / π
=
1.52 Vb
EIL( y - L/2 )
App 4 - Modify the model to accommodate GRT
Here are the details of the factor-by-factor re-evaluation of the model, in an attempt to make GRT look like a good design choice.Change the parameters of the model
The basis of the model is equation 3a:spin = 25 y VbThat, and the value of C (which we set at 1.3, but could realistically vary between 1.1 and 1.5), are the major contributors to the way the model fits the published data. (C figures in because it is instrumental in determining y in equation 3a.) The simplest, and undoubtedly the most effective, way to vary the model is to play with the value 25 -- the coefficient in equation 3a, so we'll refer to it as coef -- and with the value of C.
I played with C and especially coef until the model gave an optimum roll that was close to GRT.
| Original Model coef=25 C=1.2 |
Modified Model coef=12 C=1.1 |
Actual GRT |
 Figure A4-1 |
|
| Optimum high-face roll |
8" | 16.4" | 15" | |
| Optimum low-face roll |
10" | 19.1" | 20" |
 Figure A4-2 Let's review what we are doing here. We have modified the parameters of the mathematical model so that the optimal face roll is essentially the same as GRT. This gives us a new model -- an as-yet unvalidated model. We have data that we can use to validate any model for vertical gear effect. We just have to plug the launch angle and clubhead speed into the mathematical model, and see what backspin we wind up with. If the backspin matches the measured data, then the model is valid; if not, the model is not a good representation of reality. So let's try it with the new, modified model (coef=12, to match GRT). Figure A4-2 is the comparison. The modified model (yellow line) does not match Hotstix data at all, while the original model (red line) is a good match. The yellow line does not even show backspin decreasing with the height of impact; it is nearly constant -- and increasing if you look closely. So it cannot possibly be a valid model. And, if it is not a good model for vertical gear effect, it cannot be used to justify GRT. We will have to look elsewhere. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Shaft tip flexSuppose shaft tip flex limited the gear effect. If it limited it enough, then GRT might be a superior face roll design. Let's explore this a little. Points to consider:
What would be the influence on roll of a 5% reduction of gear effect due to shaft tip stiffness? (We're being very generous here; there are few golfers that would benefit from a shaft change of this magnitude.) When we go through re-optimization, we find that:
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Spin for 11° loft at 100mph clubhead speed |
|
| Wishon | 2860 |
| Our formula | 3053 |
| Dupilka | 3102 |
I went back and recomputed the validation against the Hotstix data, using the loft backspin reduced by 7%. This required a reduction in the gear effect spin for a best match to the data. The best match occurred with coef=21.5 (instead of the original model where coef=25). With these changes, the fit to the data was even better than the original model. Not a lot better, but it was better. So it is entirely possible that that the formula for backspin from loft should be 7% less.
As we did with shaft tip flex, let's see what this does to the optimum loft high and low on the face.
- At +0.23", there is no gear effect spin, but the backspin is now lower; the ideal loft becomes 12.0°. We will use this number, rather than 11.7°, for computing the differences. In other words, the differences will be -0.3° from what they appear at first glance.
- At -0.8", the ideal loft goes from 4.7° to 5.8°, a difference of +0.8°.
- At +0.8", the ideal loft goes from 16.0° to 16.1°, a difference -0.2°.
Note that this is the most plausible of the changes that produce a significant difference, so it has been cranked into the calculations of GRT performance on page 6. The lower-spin parameters (7% less backspin, and coef=21.5) were used to produce Figure 6-2 and the related tables.
Corrections for clubhead rotation
Figure A4-3
- There is some upward movement from black to red. Of course! That is what gives us gear effect in the first place.
- There is some backward movement from black to red. The clubface is "falling away" from the ball. The effect is a loss of some of the clubhead speed. That is the wx vector in Figure 1-3.
- There is some increased tilt (loft) from black to red.
Numbers 2 and 3 represent corrections that should be applied when we compute the distance as we optimize the lofts. #2 is a correction to the clubhead speed, and #3 is a correction to the loft. The problem is, how much of a correction should be made? Without any correction, the black image is used for the computation. But we don't want to just use the red image; that represents things at a time that the clubhead no longer has influence on the ball. The best, most accurate correction should be somewhere in between.
It is easy to make a case for using the average of the before (black) and after (red) conditions. That is,
- Take half the rotation and used it as the correction for loft.
- Take half the wx vector as the ball leaves the clubhead and used it as the correction for clubhead speed.
The size of the corrections will have an impact on the computed optimum lofts, which determine the optimum roll. In particular:
- Loft correction, for both high and low hits, look like increased effective roll. So, the bigger the correction, the less actual roll you need in the clubface to accomplish the change in loft over the face. So a bigger loft correction will yield a flatter curvature for the optimum roll.
- Speed correction, for both high and low hits, requires a higher loft for optimum distance. That is because the lower the clubhead speed, the more loft you need. So a bigger speed correction will result in a flatter face low and a more curved face high.
For the loft correction:
- At -0.8", the ideal loft goes from 4.7° to 6.3°, a difference of +1.6°.
- At +0.8", the ideal loft goes from 16.0° to 15.2°, a difference -0.8°.
- At +0.23", there is no gear effect spin; the ideal loft remains at 11.7°.
- At -0.8", the ideal loft goes from 4.7° to 4.9°, a difference of +0.2°.
- At +0.8", the ideal loft goes from 16.0° to 15.9°, a difference -0.1°.
- At +0.23", there is no gear effect spin; the ideal loft remains at 11.7°.
COR change over the clubface
Figure A4-4
What would COR falloff do to the ideal loft at each height, and thus the optimum roll radius? The result would look something like the speed correction we saw above. Again, the speed will fall off at the top and bottom, compared to the middle. So we should expect the result would be a flatter face.
Let's compute the effect on roll, using a model chosen for easy computation rather than strict realism. We will assume the middle third of the clubface (actually from +0.23" to -0.23") is the full .83 COR, and it falls off on either side. For the worst falloff in the data in Figure a4-4, the COR would still be above 0.79 at +0.8" and -0.8". So let's use 0.79 at ±0.8", to see how flat we can optimally make the face with this change.
- At -0.8", the ideal loft goes from 4.7° to 4.9°, a difference of +0.2°.
- At +0.8", the ideal loft goes from 16.0° to 15.9°, a difference -0.1°.
- At +0.23", there is no gear effect spin; the ideal loft remains at 11.7°.
- At -0.23", we will use the ideal loft from optimization on the original model, 8.2°.
The result is a small step in the direction of a flatter face.
The irony is that the faces with the least COR falloff in Figure A4-4 are TWGT clubs with GRT faces. So the non-Wishon drivers are a better match to a GRT roll. (But only very incrementally -- less than a quarter inch of roll radius difference.)
Adding it all up...
 Figure A4-5Here is a graph of all the factors and what each contributes to roll radius. For each factor, we have calculated the ideal loft at the top and bottom of the range (+0.8" and -0.8"). We can find an overall roll for the face, using our equation: R = 57.3 ΔH / ΔL For ΔH, we use 1.6", the distance from top to bottom of the range. ΔL is the difference in ideal loft between top and bottom. The only factor that contributes more than an inch to the roll radius is the head-rotation loft correction. It contributes just over two inches. And we can't possibly get all of that, because it would require all the correction effect to be taking place as the ball is leaving the clubhead. It is unlikely we could get more than half this correction in reality. This does not hold much promise that incorporating these factors will get us very close to GRT. |
Let's take a closer look. This time we'll use a table with numbers instead of a graph. We'll also look separately at the top 1/3 of the face and the bottom 2/3.
Besides the ideal loft at ±0.8", we also know that the zero-gear-effect height is +0.23", which is 0.57" from the top and 1.03" from the bottom. At that height, the ideal loft is 11.7°. Now it is easy to calculate the radius of roll curvature. The equation becomes:
RtopThird = 57.3 * 0.57 / (Loft+0.8 - 11.7)This is not a point-by-point optimization, but rather the average roll over the top third and, separately, the bottom two thirds of the clubface. From the graphs we have already plotted, it is likely that this average is representative of the roll we would see from a point-by-point optimization, but without the "noisy" radius variation.
RbottomTwoThirds = 57.3 * 1.03 / (11.7 - Loft-0.8)
The table below shows the ideal roll radius if each of the assumptions is relaxed (in a direction to favor GRT), individually and in some of the more likely combinations:
| Assumption | Ideal loft at top (+0.8") |
Change in loft from original |
Ideal loft at bottom (-0.8") |
Change in loft from original |
Implied roll: top 1/3 |
Implied roll: bottom 2/3 |
| Original model | 16.0° | -- | 4.7° | -- | 7.6" | 8.4" |
| Gear effect limited (5%) by shaft tip stiffness. | 15.6° | -0.4° | 4.9° | +0.2° | 8.4" | 8.7" |
| Loft spin reduced (7%), and model readjusted for best fit to data. (Turned out to be coef=21.5) | 16.1° | -0.2° [1] | 5.8° | +0.8° [1] | 8" [1] | 9.5" [1] |
| Loft correction for rotation (raised from half to full) | 15.2° | -0.8° | 6.3° | +1.6° | 9.3" | 10.9" |
| Clubhead speed correction for rotation (raised from half to full) | 15.9° | -0.1° | 4.9° | +0.2° | 7.8" | 8.7" |
| COR rolls off away from center of face | 15.9° | -0.1° | 4.9° | +0.2° | 7.8" | 9.9" [2] |
| Collection of all factors [3] | 14.4° | -1.6° | 7.7° | +3.0° | 12.1" | 14.8" |
Collection of reasonable factors: [3]
|
15.25° | -0.75° | 6.6° | +1.9° | 9.2"" | 11.6" |
- Calculation based on a loft of 12.0° at +2.3", not 11.7°.
- This is just the bottom 1/3, not the bottom 2/3.
- The collections of factors (the blue rows) are computed by adding up the changes in loft, then applying those changes to the original model loft to get a new loft. Then we compute the implied roll from the new loft.
The first blue row in the table is the combination of every factor we have considered here. All added together, they push the radius of curvature up over 12", but:
- The 12"/15" (high/low) curvature is still closer to conventional roll than to the 15"/20" of GRT.
- It includes some rather implausible and unlikely factors.